Resources: Global Navigation Satellite Systems

When the US Global Positioning System (GPS) was first conceived back in the 1970s I imagine that nobody could have foreseen just how ubiquitous this technology would become. Can you imagine a world now where we didn't have GPS? A large part of our society would probably just cease to function. Now GPS is just one of several global navigation satellite systems (GNSS). In addition to the US GPS there is the European Galileo, the Russian GLONASS and the Chinese Beidou. All these systems work in a very similar way, and increasingly, in devices like mobile phones, you have access to more than one of them. This is a good thing because the more satellites your device can see, the better your position accuracy.
The position accuracy of GNSS can be improved by having access to sets of corrections. This correction data makes small changes, in your GNSS device, to things like the orbital position of GNSS satellites, their atomic clock times and variations in the ionosphere. Good correction data can improve positional accuracy from metres to centimetres. The US and Europe have built systems to provide these corrections, primarily for aircraft. Australia is building one which is called SouthPAN.
GNSS is very vulnerable to the actions of bad actors. GNSS satellites are in mid Earth orbit at around 20,000 km. Their transmitted signals are quite weak and can be easily jammed. Worse, it is possible to spoof GNSS signals meaning that your device calculates an incorrect position. Unfortunately jamming and spoofing events are becoming all too common. At this time, for obvious reasons, it is pretty much impossible to use GNSS over eastern Ukraine. As a result there are research efforts underway to find techniques to make GNSS signals more resilient and resistant to spoofing and jamming.
Paper
Detecting outliers in local ionospheric model for GNSS precise positioning
28 May 2024
Global Navigation Satellite System fast precise positioning can be achieved with accurate ionospheric corrections computed from an adequate number of GNSS stations in a local region. In this study, we explored outlier detection in ionospheric correction mapping through statistical residuals during a four-month test in 2021.
GPS Solutions (2024) 28:153 https://doi.org/10.1007/s10291-024-01685-9
Tam Dao, Ken Harima, Brett Carter, Julie Currie, Simon McClusky, Rupert Brown, Eldar Rubinov, John Barassi, Suelynn Choy.
Download here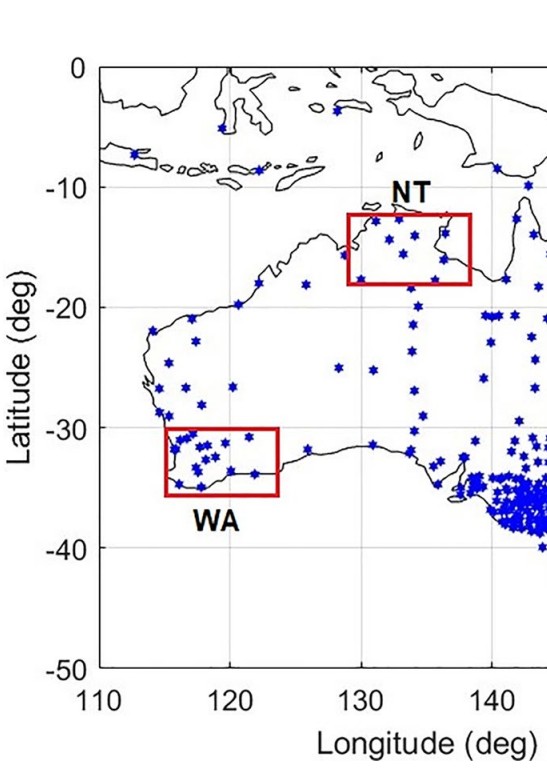
Paper
Regional Ionospheric Corrections for High Accuracy GNSS Positioning
20 May 2022
Centimetre-level accurate ionospheric corrections are required for a high accuracy and rapid convergence of Precise Point Positioning (PPP) GNSS positioning solutions. This research aims to evaluate the accuracy of a local/regional ionospheric delay model using a linear interpolation method across Australia.
Remote Sens. 2022, 14, 2463. https://doi.org/10.3390/rs14102463
Tam Dao, Ken Harima, Brett Carter, Julie Currie, Simon McClusky, Rupert Brown, Eldar Rubinov, John Barassi, Suelynn Choy.
Download here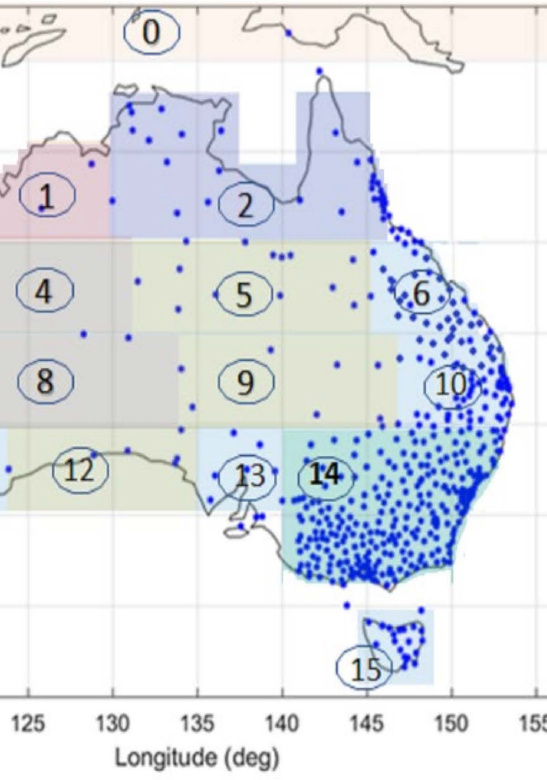
Presentation
Reference frames that enable positions to be defined on Earth
17 June 2021
International Celestial Reference Frame, International Terrestrial Reference Frame, Latitude, Longitude and Altitude.
Rupert Brown
Download here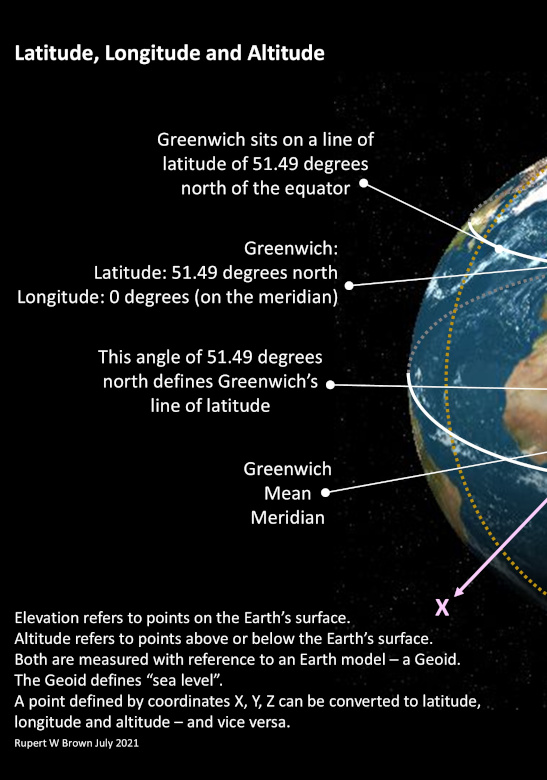
Presentation
Global Navigation Satellite Systems - A very short introduction
9 December 2021
System segments, basic trilateration, GNSS constellations and a GNSS satellite overview.
Rupert Brown
Download here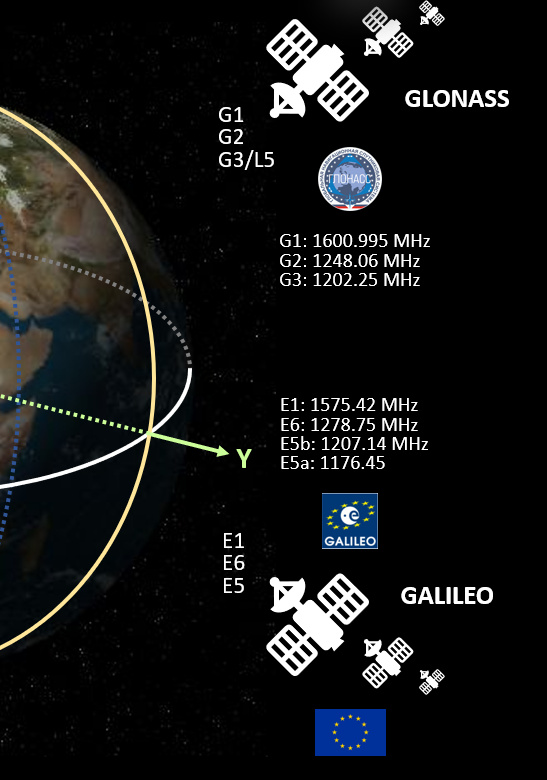
Presentation
An introduction to the GNSS Standard Positioning Service
23 June 2021
Creating the GNSS signal message, receiving and decoding the message, using the message data to create pseudoranges, using trilateration to determine positions.
Rupert Brown
Download here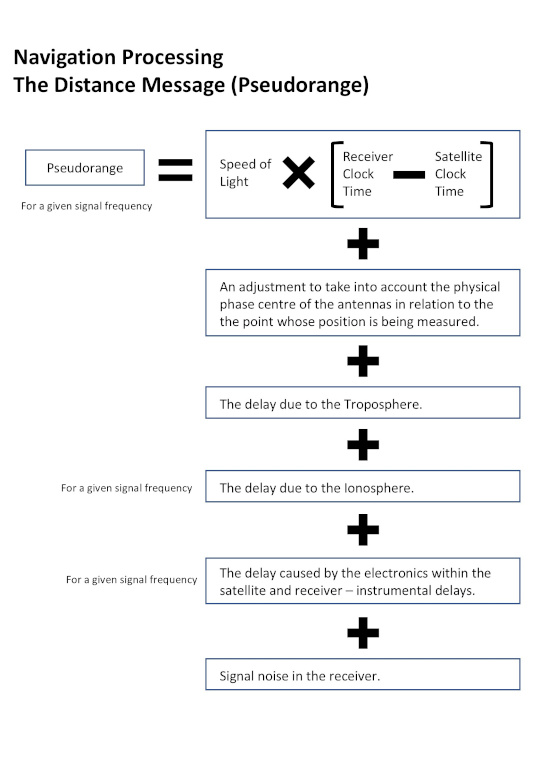
Presentation
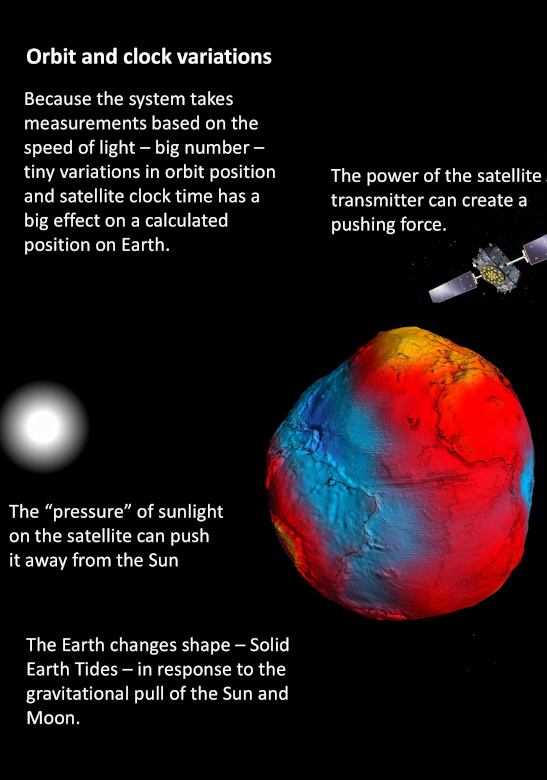
An introduction to the concepts that make up Precise Point Positioning (PPP)
25 June 2021
Understanding sources of errors, creating correction models and data, applying corrections to improve positional accuracy.
Rupert Brown
Download here